Mars Reconnaissance Orbiter
See artikkel ootab keeletoimetamist. (Oktoober 2023) |
Mars Reconnaissance Orbiter (MRO) on NASA kosmosesond, mis uurib Marssi[2]. Sondi juhib NASA nimel JPL. Sondi maksumus on 720 miljonit USA dollarit[3]. Missioon pidi kestma kaks aastat, kuid see on kestnud üle kümne aasta[3].
 Kunstniku kujutis Mars Reconnaissance Orbiterist Marsi orbiidil. | |
| Missiooni tüüp | kosmosesond |
|---|---|
| Operaator | NASA/JPL |
| COSPAR ID | 2005-029A |
| SATCAT | 28788 |
| Missiooni kestus |
kaks aastat (planeeritud) 17 aastat 1 kuu ja 13 päeva (seisuga 23.04.2023) |
| Kosmoseaparaadi omadused | |
| Stardimass | 2180 kg |
| Kuivmass | 1031 kg |
| Lasti mass | 139 kg |
| Võimsus | 1000 W |
| Missiooni algus | |
| Stardi aeg | 11.43.00, 12. august 2005 (UTC) |
| Kanderakett | Atlas V |
| Stardikompleks | Cape Canaverali stardikompleks 41 |
| Starditeenuse osutaja | Lockheed Martin |
| Orbiidi elemendid | |
| Taustsüsteem | areotsentriline orbiit |
| Režiim | päikesesünkroonne orbiit |
| Periapsiid | 250 km[1] |
| Apoapsiid | 316 km[1] |
| Orbiidi kalle | 93 kraadi |
| Tiirlemisperiood | 111 minutit |
 | |
MRO startis Marsile 12. augustil 2005[4] ja jõudis Marsi orbiidile 10. märtsil 2006[5]. Lõplikule orbiidele jõudis see novembris 2006[6] ja seejärel alustas sond planeedi uurimist[7].
Mars Reconnaissance Orbiteri pardal on rohkesti teadusaparatuuri, näiteks kaamerad, spektroskoobid ja radar, mille abil uuritakse Marsi pinnavorme, stratigraafiat, mineraale ja jääd[8]. Satelliidi sidesüsteemid on nii võimsad, et NASA loodab seda kasutada ülekandejaamana ka tulevaste missioonide jaoks[3].
Missiooni eesmärgid
muudaEsialgse plaani järgi pidanuks MRO missioon kestma kaks aastat, novembrist 2006 kuni novembrini 2008. Missiooni üks peamisi eesmärke on kaardistada Marsi pind sondi kõrgresolutsioonilise kaameraga, et nende fotode abil valida maandumispaigad tulevastele Marsil maanduvatele missioonidele[9]. Mars Reconnaissance Orbiteri tehtud fotosid kasutati näiteks Phoenixi ja Curiosity maandumispaikade valimisel[10][11].
MRO teised teadusseadmed uurivad Marsi kliimat, ilma, Marsi atmosfääri ja geoloogiat ning sond otsib planeedilt ka vedelat vett. Lisaks seati üheks eesmärgiks kadunuks jäänud Mars Polar Landeri ja Beagle 2 rusude leidmine[12]. Beagle 2 leidis sond 2015. aastal[13], kuid Mars Polar Landerit pole leitud[14].
Mars Reconnaissance Orbiter toimib ka side ülekandejaamana, mis vahendab suhtlust Maa ning Marsil asuvate kulgurite ja maandurite vahel[15].
Start ja orbiidile sisenemine
muuda
Mars Reconnaissance Orbiter startis Marsile 12. augustil 2005 ja selle viis orbiidile kanderakett Atlas V[16]. Start möödus viperusteta[17].
Sond saabus Marsile seitse ja pool kuud hiljem[18]. Enne planeedi juurde jõudmist oli NASA katsetanud ja kalibreerinud kõiki teadusseadmeid ning korrigeerinud kolm korda sondi kurssi. Esialgu oli planeeritud, et kurssi tuleb korrigeerida neli-viis korda, kuid selleks polnud vajadust ja nii säästeti pikendatud missiooni jaoks 27 kg kütust[19].
MRO alustas orbiidile sisenemist 10. märtsil 2006 ja käivitas oma peamootori 27 minutiks, et aeglustada oma liikumiskiirus 1900 meetrini sekundis. Heeliumipaagi arvatust madalam temperatuur vähendas mootori tõukejõudu 2%, kuid pardaarvuti korrigeeris selle automaatselt, lastes mootoril töötada 33 sekundit ettenähtust kauem[20].
Orbiidile sisenemine oli edukas ja sondi jäi orbiidile, mille orbitaalperiood oli 35,5 tundi[21]. Selle orbiidi perigee oli 426 km ja apogee 44 500 km[22].
30. märtsil 2006 alustas MRO aeropidurdamist ehk oma orbitaalperioodi lühendada. Esiteks alandas sond tõukurite abil oma perigee kõrgust, et Marsi atmosfäär hakkaks sondi aeglaselt pidurdama. Seejärel jäis sond sellele kõrgusele 445 tiiru ajaks, et vähendada apogee 450 kilomeetrini. Insenerid pidid aeropidurdamisel pidevalt jälgima, et sond oleks piisavalt kõrgel, et see liialt ei kuumeneks, aga samas piisavalt madalal, et atmosfäär mõjutaks sondi. Mars Reconnaissance Orbiter lõpetas aeropidurdamise ja liikus atmosfääri mõjualast välja 30. augustil 2006[23].
Septembris 2006 korrigeeris MRO tõukurite abil oma orbiidi veelgi, ning on nüüd 250–316 km kõrgusel orbiidil ning tiirlemisperioodiks on 112 minutit[24][25].
Teadusaparatuur
muudaMRO pardal on kolm kaamerat, kaks spektromeetrit ja radar. Lisaks on pardal kaks seadet, mis kasutavad alamsüsteeme, et koguda teadusandmeid. Kolm süsteemi on mõeldud katsetama uut varustust tuleviku missioonide tarbeks. Mars Reconaissance Orbiter peaks tegema umbes 5000 pilti aastas[26].
HiRISE
muuda Pikemalt artiklis HiRISE
Pikemalt artiklis HiRISE

High Resolution Imaging Science Experiment ehk HiRISE on kaamera, mille resolutsioon on 1 mikroradiaan või siis 30 sentimeetrit piksli kohta 300 kilomeetri kõrguselt. Võrdluseks, Maa orbiidil tiirlevate satelliitide fotod Maast on tavaliselt resolutsiooniga 50 cm/piksel. HiRISE teeb pilte värvispektri kolmes lainealas: 400–600 nm (sinine-roheline), 550–850 nm (punane) ja 800–1000 nm (lähiinfrapuna)[27].
Punased pildid on 6 km laiad ja teistes lainealades tehtud pildid on 1,2 kilomeetrit laiad. HiRISE-i pardaarvuti loeb saabuvat infot reaalajas ning pildi pikkust piirab ainult pardaarvuti mälu, mis on 28 GB[28]. Tavaliselt on ühe pildi maht 16,4 GB ja kõik pildid tihendatakse enne Maale saatmist 5 gigabaidini. Piltide pealt on suudetud eristada kuni 25 sentimeetri suurusi objekte. HiRISE-i ehitas Ball Aerospace & Technologies Corporation[29].
CTX (kaamera)
muudaContext Camera (CTX) on kaamera, mis teeb mustvalgeid fotosid resolutsiooniga kuni 6 meetrit ja selle eesmärgiks on pildistada taustkaardid HiRISE-i ja CRISM-i jaoks[30]. Lisaks pildistatakse sellega tähtsaks peetavaid regioone ning võimalikke maandumispaiku tulevastele missioonidele[31][32][33]. CTX teeb pilte, mille laius on 30 km ja pikkus kuni 160 kilomeetrit ning selle abil oli 2010. aastaks Marsi pinnast kaardistatud 50%[34]. Kaamera ehitas ja selle käigus hoidmise eest vastutab Malin Space Science Systems[35].
MARCI
muuda
Mars Color Imager (MARCI) on madala resolutsiooniga kaamera, mis pildistab Marssi viies nähtavas ja kahes ultraviolett lainealas[36]. Kaamera teeb iga päev umbes 84 pilti, mille resolutsioon on 1–10 km piksli kohta. Selle seadme abil avaldab NASA igapäevase Marsi ilmateate[37]. Kaamera aitab kirjeldada Marsi muutumist vastavalt aastaajale ning kaardistab Marsi atmosfääris olevat veeauru ning osooni. Kaamera ehitas ja selle käigus hoidmise eest vastutab Malin Space Science Systems[38].
CRISM
muudaCompact Reconnaissance Imaging Spectrometer for Mars (CRISM) on spektromeeter, mille ülesandeks on kaardistada Marsi pinnas leiduvaid mineraale. See töötab lainealas 370–3920 nm ja mõõdab spektrit 544 kanaliga (igaüks on 6,55 nm lai). CRISM-i resolutsioon on 18 m 300 km kõrguselt ja sellega otsitakse peale mineraalide ka keemilisi elemente, mis viitaksid minevikus või tänapäeval Marsil voolavale veele[39].
MCS
muuda
Mars Climate Sounder (MCS) on Marsi atmosfääri jälgiv spektromeeter, mis on MRO pardal suunatud alla ja horisontaalselt läbi atmosfääri, et mõõda atmosfääris toimuvaid muutusi. Mars Climate Sounderil on üks lähiinfrapuna kanal (0,3–3,0 μm) ja kaheksa infrapuna kanalit (12–50 μm)[40]. MCS jagab uuritava ala 5 kilomeetri pikkusteks lõikudeks ja kogub infot iga lõigu kohta eraldi[41][42]. Kogutud infot kasutatakse muuhulgas igapäevaste Marsi ilmakaartide koostamisel, et näidata Marsi ilma põhilisi muutujaid: temperatuuri, õhurõhku, niiskust ja tolmutihedust[43].
Mars Climate Sounderi ehitas NASA Jet Propulsion Laboratory. See on täiustatud versioon seadmetest, mis ehitati Mars Observeri ja Mars Climate Orbiteri missioonide jaoks[44].
SHARAD
muuda- Pikemalt artiklis SHARAD
Shallow Subsurface Radar (SHARAD) on radar, mille eesmärgiks on uurida Marsi polaaralade jääkilpide sisemust ning otsida maa-aluseid jäätaskuid ja voolavat vett. SHARAD kasutab HF-raadiolaineid vahemikus 15–25 MHz ja selle tulemusel suudab radar leida 7 meetri kuni maksimaalselt 1 kilomeetri sügavusele[45]. SHARAD on projekteeritud töötama koos Mars Expressi teadusseadme MARSISega, mis on võimeline nägema märkimisväärselt sügavamale. SHARAD-i ja MARSISe ehitas Itaalia Kosmoseagentuur[46].
Muud seadmed
muudaPäikesepaneelid ja elekter
muuda
Mars Reconnaissance Orbiter saab kogu kasutatava elektri kahelt päikesepaneelilt, mis võivad liikuda iseseisvalt. Mõlema päikesepaneeli mõõtmed on 5,35 × 2,53 meetrit ja ühe paneeli pindala on 9,5 m2[47]. Päikesepaneele katavad 3744 elementi ja need on võimelised muutma 26% saadavast päikesevalgusest elektriks. Elementide kogutoodang on 32 volti[48]. Marsi orbiidil on Mars Reconnaissance Orbiteri ühe päikesepaneeli võimsus rohkem kui 1000 W[49] ja kui MRO tiirleks Maa orbiidil, oleks ühe päikesepaneeli võimsus 3000 W[50].
Sondil on kaks laetavat nikkel-vesinikakut, mis varustavad sondi elektriga, kui see on Marsi varjus[51]. Mõlemad akud mahutavad 50 amper-tundi, kuid nende mahutavust ei saa täielikult kasutada, et vältida nende kasutuks muutumist. Nimelt peavad mõlemad akud end pidevalt laadima-tühjendama, aga tühjendamisel aku pinge langeb ning kulutab akut. MRO akude selline säästmine võimaldab nende eluiga ja selle kaudu kogu missiooni pikendada, eriti kui arvestada asjaolu, et akude rikked on kõige sagedasem kosmosesondide kaotamise põhjus.
Sondi aeropiduramise ajal mõjutas Marsi atmosfäär kõige rohkem päikesepaneele, mis toimisid väikeste langevarjudena ja aeglustasid sondi kiirust. Insenerid pidid selleks, et Marsi atmosfäär päikesepaneele ei lõhuks, ehitama need nii, et need taluksid temperatuure kuni 200 °C[52].
Elektroonika
muudaMars Reconnaissance Orbiteri pardaarvuti on 133 MHz, 10,4 miljoni transistoriga 32-bitine RAD750 protsessor. See protsessor on radiatsioonikindel versioon PowerPC 750st või G3-protsessorist, millel on eritellimusel ehitatud emaplaat. Protsessor võib tänapäevaste arvutitega võrreldes tunduda nõrk, kuid see on töökindel, vastupidav ning suudab töötada ka päikesetormide tingimustes[53].
Sondi kogutud info talletatakse 160 Gb (20 GB) välkmälumoodulisse, mis koosneb üle 700 mälukiibist, millest igaüks on mahutavusega 256 Mbit. See mahutavus tundub suur, aga arvestama peab asjaoluga, et üks HiRISE-i foto võib olla kuni 28 Gb suurune[53].
Side
muuda
Mars Reconnaissance Orbiteri pardal on siiani läbi aegade parim süvakosmosesse saadetud sidesüsteem[49]. Sondi Electra sidepakk on UHF-sagedusalas töötav tarkvaraline raadio, mis võimaldab paindlikku suhtlust. Electra on projekteeritud nii, et see võib ise võtta ühendust Marsile läheneva, maanduva ja seal töötava kosmoseaparaadiga. Lisaks saab Marsil töötava kulguri Electra abil oma asukohta määrata[54]. Süsteem koosneb suure võimendusega antennist, mille läbimõõt on kolm meetrit ja mille kaudu suhtlus Maaga toimub X-riba ja Süvakosmose sidevõrgu kaudu sagedusel 8 GHz. Andmeside maksimaalseks kiiruseks on 3–4 Mbit/s ja see on kümme korda kiirem kui varasematel Marsi tehiskaaslastel[55]. MRO pardal on ka kaks 100 vatist X-riba elektroonilist võimendit (millest üks on varuks) ja üks 35 vatine Ka-riba võimendi[56].
Sondil on ka kaks madala võimendusega sideantenni, mis ei kasuta paraboolantenne ja võimaldavad Maaga suhelda ükskõik millise nurga alt. Neid antenne kasutati stardi ajal ja Marsi orbiidile sisenemise ajal ning edaspidi kasutatakse neid ainult hädaolukorras kui peamine sideantenn pole suunatud Maale[56].
Ka-riba sidesüsteemi otsustati kasutada muuhulgas ka sellise sidesüsteemi katsetamiseks tulevikumissioonide tarbeks[57]. Teel Marsile katsetati süsteemi 36 korda ja Ka-riba katsed olid ette nähtud ka teadusmissiooni ajaks, kuid aeropidurdamise ajal läks üks võimenditest katki ning nüüd on suure võimendusega antennil ainult üks võimendi. Kui ka see võimendi katki läheb, ei saa sond enam kiiret andmesidet võimaldavat X-riba kasutada. Sel põhjusel otsustas JPL kõik Ka-riba katsetused lõpetada, et süsteemi liigsest koormusest säästa[58].
Novembris 2013 oli MRO Maale edastanud informatsiooni 200 terabitti. See tähendab, et Mars Reconnaissance Orbiter on edastanud kolm korda rohkem informatsiooni kui ülejäänud NASA sondid kokku[59].
Käitursüsteem ja asendikontroll
muudaMars Reconnaissance Orbiteri pardal on 20 tõukurit. Kuus suuremat tõukurit tekitavad tõukejõudu kokku 1020 N ja neid kasutati orbiidile sisenemisel. Kuuest keskmise suurusega tõukurist on igaüks eraldi tekitama tõukejõudu 20 njuutoni jagu ning neid kasutati Marsi orbiidile sisenemisel ja orbiidile sisenemise kõrguse määramiseks. Kaheksat väikest tõukurit, mis tekitavad tõukejõudu 0,9 njuutonit, kasutatakse pidevalt asendi määramiseks ja korrigeerimiseks[60].
MRO tõukurid ammutavad tööks vajalikku kütust 1175 liitrisest kütusepaagist, mis täideti stardi eel 1187 kg hüdrasiiniga. Enamik kütusest (70%) kasutati ära Marsi orbiidile sisenemisel[60], kuid sondil on järgi piisavalt kütust, et toimida kuni 2030. aastateni[61]. Kütuse rõhku reguleeritakse heeliumi lisamisega.
Asendi määramisel kasutatakse lisaks tõukuritele ka nelja reaktsiooniratast, kuid neid kasutatakse tavaliselt siis, kui on tarvis stabiilset asendit (näiteks HiRISE-iga pildistamise ajal). Süsteemi kolm ratast kontrollivad igaüks ühte liikumisnurka ja neljas on tagavaraks. Üks reaktsiooniratas kaalub 10 kg ja see võib pöörelda kuni 6000 p/min[60].
Sond kasutab oma orbiidi ja vajalike manöövrite arvutamiseks kuutteist päikesesensorit (pooled on tagavaraks) ja kaht tähekompassi, mis annavad NASAle infot sondi asendi kohta. Lisaks kasutatakse kahte miniatuurset inertsimõõtmisüksust (MIMU), millest igaüks koosneb kolmest kiirendusandurist ja güroskoobist. Need süsteemid on väga olulised, sest kõrgresolutsiooniga fotode tegemiseks on vaja sondi kaamera väga täpset suunamist. Süsteemid on projekteeritud minimeerima ka vibratsiooni, et see ei häiriks piltide kvaliteeti[62].
Galerii
muudaSond
muuda-
 Sond saabumas Kennedy Kosmosekeskusse
Sond saabumas Kennedy Kosmosekeskusse -
 Suure võimendusega antenni paigaldamine
Suure võimendusega antenni paigaldamine -
 MRO enne lastiruumi paigutamist
MRO enne lastiruumi paigutamist -
 MRO start
MRO start -
 MRO start
MRO start -
 Kunstniku kujutis sondist vaadatuna eest
Kunstniku kujutis sondist vaadatuna eest





.jpg)
MRO fotosid Marsist
muuda-
 Danielsoni kraatri pind
Danielsoni kraatri pind -
 Marsi keeriste jäetud jäljed
Marsi keeriste jäetud jäljed -
 Victoria kraater
Victoria kraater -
 HiRISE'i foto Marsi maalihkest
HiRISE'i foto Marsi maalihkest -
 Liivadüün Marsi põhjapoolusel
Liivadüün Marsi põhjapoolusel -
 Marsi laviin
Marsi laviin -
 Centauri Montes
Centauri Montes -
 Amenthes Fossae
Amenthes Fossae -
 Acidalia Planitia
Acidalia Planitia -
 Phlegra Montes
Phlegra Montes










Teised kosmoseaparaadid
muuda-
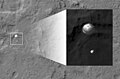
 HiRISE'i foto Phoenix'i Marsile maandumisest. Pildi peal tundub, et Phoenix on teel kraatrisse, kuid see maandus tegelikult 20 km kaugusele kraatri ette
HiRISE'i foto Phoenix'i Marsile maandumisest. Pildi peal tundub, et Phoenix on teel kraatrisse, kuid see maandus tegelikult 20 km kaugusele kraatri ette -
 Curiosity teel Marsi pinnale
Curiosity teel Marsi pinnale -
 Phoenix Marsi pinnal
Phoenix Marsi pinnal -
 Kulgur Curiosity ja tema jäetud jäljed Marsil. Curiosity on pildil heleda täpina all vasakul
Kulgur Curiosity ja tema jäetud jäljed Marsil. Curiosity on pildil heleda täpina all vasakul -
 Kulgur Opportunity Victoria kraatri juures
Kulgur Opportunity Victoria kraatri juures

_-_Flickr_-_NASA_Goddard_Photo_and_Video.jpg)



Viited
muuda- ↑ 1,0 1,1 Mars Reconnaissance Orbiter Reaches Planned Flight Path
- ↑ Postimees:NASA uurimislaev jõudis Marsi orbiidile
- ↑ 3,0 3,1 3,2 Space.com:Eagle-Eyed NASA Mars Probe Celebrates 10 Years at Red Planet
- ↑ "NASA MRO Launch Archives". Originaali arhiivikoopia seisuga 22. jaanuar 2022. Vaadatud 20. detsembril 2016.
- ↑ Red Planet Arrival: NASA's MRO Spacecraft Enters Mars Orbit
- ↑ JPL: MRO Aerobraking
- ↑ MRO Mission Timeline Summary
- ↑ JPL: MRO Science Instruments
- ↑ Space.com:Mars Reconnaissance Orbiter: Mapping Mars in High Definition
- ↑ National Air and Space Museum: Selecting Landing Sites on Mars
- ↑ Mars Exploration Program 2007 Phoenix landing site selection and characteristics
- ↑ Space.com: Orbiter to Look for Lost-To-Mars Probes
- ↑ The Guardian:Beagle 2 spacecraft found intact on surface of Mars after 11 years
- ↑ Popular Science:How NASA Found The Lost ExoMars Lander So Quickly
- ↑ NASA: MRO Mission Timeline: Communications Relay
- ↑ ILS:ILS To Launch Mars Reconnaissance Orbiter For NASA On Atlas V
- ↑ NASA MRO:NASA's Multipurpose Mars Mission Successfully Launched
- ↑ Spaceflight Now: MRO Mission Status Center
- ↑ NY Times: U.S. Spacecraft Enters Orbit Around Mars
- ↑ Spaceflight Now:Spacecraft enters orbit around Mars
- ↑ Space.com:New Mars Orbiter Ready for Action
- ↑ NASA/JPL:MARS RECONNAISSANCE ORBITER AEROBRAKING DAILY OPERATIONS AND COLLISION AVOIDANCE
- ↑ Space.com:Mars Orbiter Successfully Makes Big Burn
- ↑ JPL: Mars Reconnaissance Orbiter
- ↑ NASA Facts:Mars Reconnaissance Orbiter
- ↑ New Scientist:Stunning snaps from best camera ever sent to Mars
- ↑ HiRISE: HiRISE Instrument Components[alaline kõdulink]
- ↑ "Advanced Imaging Magazine:Imaging the Surface of Mars". Originaali arhiivikoopia seisuga 4. veebruar 2017. Vaadatud 3. veebruaril 2017.
- ↑ "Ball Aerospace:High Resolution Imaging Science Experiment". Originaali arhiivikoopia seisuga 9. märts 2017. Vaadatud 3. veebruaril 2017.
- ↑ NASA Mars: CTX Context Camera
- ↑ AGU Publications:Context Camera Investigation on board the Mars Reconnaissance Orbiter
- ↑ Mars scientists propose landing sites for future rovers
- ↑ NASA Mars: HiRISE High Resolution Imaging Science Experiment
- ↑ MSSS:Mars Reconnaissance Orbiter (MRO) Context Camera (CTX)
- ↑ MSSS: Operations
- ↑ NASA Mars: MARCI Mars Color Imager
- ↑ MSSS:MRO MARCI Weather Report
- ↑ USGS Astrogeology Science Center:Context Camera (CTX) Image Mosaics for Mars Human Exploration Zones 5m
- ↑ CRISM: Overview
- ↑ NASA Mars: MCS Mars Climate Sounder
- ↑ "University of Reading: NASA Mars Climate Sounder (MCS)". Originaali arhiivikoopia seisuga 23. aprill 2016. Vaadatud 4. veebruaril 2017.
- ↑ Solar Views:The Mars Reconnaissance Orbiter using its Mars Climate Sounder instrument
- ↑ "NASA: MRO Mars Climate Sounder (MCS)". Originaali arhiivikoopia seisuga 5. veebruar 2017. Vaadatud 4. veebruaril 2017.
- ↑ AGU publications: Mars Climate Sounder: An investigation of thermal and water vapor structure, dust and condensate distributions in the atmosphere, and energy balance of the polar regions
- ↑ NASA Mars: MRO SHARAD Shallow Radar
- ↑ "NASA: Shallow Subsurface Radar (SHARAD)". Originaali arhiivikoopia seisuga 5. veebruar 2017. Vaadatud 4. veebruaril 2017.
- ↑ Encyclopedia Astronautica: Mars Reconnaissance Orbiter
- ↑ NASA Mars: MRO Mission Electrical Power
- ↑ 49,0 49,1 America Space: Smooth Sailing, Mr. O: 10 Years Since the Launch of the Mars Reconnaissance Orbiter
- ↑ "LandoLoma:Mars Reconnaissance Orbiter". Originaali arhiivikoopia seisuga 5. veebruar 2017. Vaadatud 4. veebruaril 2017.
- ↑ Planetary Data System: MRO Instrument Host Information
- ↑ Mars Reconnaissance Orbiter: Spacecraft Parts: Electrical Power
- ↑ 53,0 53,1 Mars Reconnaissance Orbiter: Spacecraft Parts: Command and Data-Handling Systems
- ↑ "Tehnikamaailm:Marsi-luuraja asub tööle". Originaali arhiivikoopia seisuga 7. veebruar 2017. Vaadatud 6. veebruaril 2017.
- ↑ NASA Mars:MRO X-band Communications
- ↑ 56,0 56,1 Mars Reconnaissance Orbiter: Spacecraft Parts: Telecommunications
- ↑ "Mars Reconnaissance Orbiter:MRO Overview". Originaali arhiivikoopia seisuga 11. aprill 2017. Vaadatud 6. veebruaril 2017.
- ↑ Revolvy:Mars Reconnaissance Orbiter
- ↑ "NASA:Prolific NASA Mars Orbiter Passes Big Data Milestone". Originaali arhiivikoopia seisuga 13. veebruar 2014. Vaadatud 6. veebruaril 2017.
- ↑ 60,0 60,1 60,2 JPL: MRO Spacecraft Parts: Propulsion
- ↑ Astronomy Now:NASA to rely on Mars programme’s silent workhorse for years to come
- ↑ JPL: MRO Spacecraft Parts: Guidance, Navigation, and Control Systems